| ESTUCTURA
DELS AUTÒMATS |
|
| Per
Jordi Jordan |
| |
I
físicament, com són els autòmats? |
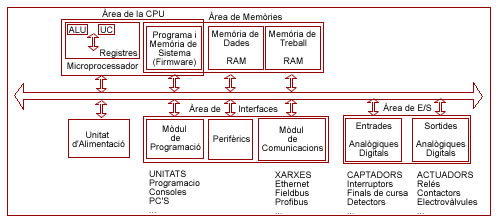
Un
autòmat no és altra cosa que un conjunt d’elements
que el conformen: un mòdul d’alimentació,
un mòdul d’entrades (analògiques i/o
digitals), un mòdul de sortides (a relés,
a transistors, a triacs,...), la CPU (Unitat de Central
de Procés), les memòries, les unitats de programació
(teclats, consoles,...), les unitats de comunicació,
els perifèrics,...
|
Un
bon tècnic ha de conèixer els autòmats,
externa i internament. |
|
| Dues
són les tendències estructurals
dels autòmats:
Estructura
compacta: tots els elements que formen part de l’autòmat
es troben integrats en una sola carcassa.
Autòmat
Compacte Nano de Schneider |
|
| Estructura
modular: cada part integrant forma un mòdul
independent. |
|
 |
Autòmat
modular Twido de Schneider |
| |
Mòdul
d'alimentació. |
El
mòdul d’alimentació serà l’encarregat
d’alimentar elèctricament la resta de mòduls.
Generalment els fabricants comercialitzem un mòdul
específic per a cada un dels seus autòmats
però si no fos així, ens haurem d’adequar
a les especificacions tècniques per ell facilitades.
Aquest
mòdul no és res més que una font d’alimentació
més o menys sofisticada (segons els requeriments
del sistema) que adaptarà la tensió d’alimentació
220/380 V 50Hz als circuits electrònics de la resta
de mòduls.
Autòmats
Modicon de Schneider
|

|
| |
Mòdul
d'entrades i de sortides. |
Serà
l’encarregat d’adaptar i codificar els senyals
d’entrada al sistema per tal que la CPU els entengui
i el pugui processar. Aquest senyals poden ser analògics
(sensors de temperatura, humitat, lumínics,..) o
digitals ( Senyals tot o res, tensió o no tensió,
com les que ens podem facilitar els polsadors, interruptors,
finals de cursa, detectors capacitatius, inductius, ...)
Una altra missió d’aquest mòdul és
la protegir els circuits electrònics interns de l’autòmat
tot separant-los elèctricament dels circuits de captació.
El
mòdul de Sortides treballarà de manera inversa
al d’entrades. Es a dir, adequarà els senyals
procedents de la CPU, tot convertint-los, amplificant-los
per que governin els actuadors a ell connectats.
Autòmats
Modicon de Schneider
|

 |
| |
Mòdul
CPU o Mòdul Central o Unitat Central de Procés |
Podríem
dir que és el cervell del sistema,
ja que és l’encarregat d’interpretar
i processar els senyals d’entrada gràcies a
una sèrie d’instruccions de programa introduïdes
per l’usuari i en conseqüència actuar
sobre les sortides.
Dins
la CPU podem diferenciar tres grans blocs:
el processador, la memòria i altres circuits electrònics
auxiliars.
|
|
| |
Processador. |
El
microprocessador que és l’encarregat
de realitzar les operacions
de tipus lògic i aritmètic, així
con de les operacions de control
de la transferència de dades dins l’autòmat.
Internament, en tot “micro” es poden diferenciar
els següents circuits:
-
ALU. Unitat Aritmètica i Lògica.
Encarregada de les operacions abans esmenades.
-
UC. Unitat de Control. Encarregada d’organitzar
totes les tasques que desenvolupa l’autòmat.
-
Registres. Memòries temporals
d’accés ràpid per emmagatzemar dades,
instruccions, adreçes,...molt important pels processos
del micro.
-
Bussos. Pistes conductores de les dades,
d’entrada, de sortida, resultats, senyals de control,...
|
Dins
el Processador trobarem:

|
| |
Memòries. |
Direm
memòria a tot dispositiu
d’emmagatzematge d’informació en forma
de bits. Hi ha dos tipus de memòria:
RAM ( Random Acces Memory) Memòria
d’accés aleatori o Memòria d’escriptura
– lectura. S’escriuen i esborren elèctricament
però perdem la informació emmagatzemada quan
falta l’alimentació elèctrica. Els
autòmats solen emprar aquest tipus
de memòria per l’usuari, per la Taula de Dades
( espai on s’enregistren els estats de les entrades
i sortides i els valors numèrics de les dades internes
com per exemple les dels comptadors, temporitzadors, etc...)
i per la Memòria de Sistema. Molts
autòmats per que no es perdin aquestes dades incorporen
una bateria que mantindrà la informació de
la RAM en períodes de desconnexió. Altres
simplement la substitueixen per memòries tipus EEPROM
(aquestes es poden enregistrar i esborrar elèctricament)
que mantenen la informació sense alimentació.
ROM
( Read Only Memory ) o Memòria unicament
de lectura. Aquest tipus de memòries mantindran la
informació fins i tot quan falti l’alimentació
elèctrica. S’enregistrem durant el procés
de fabricació i no es poden esborrar. El
programa de Sistema (firmware) empra aquest
tipus de memòria, tot i que alguns autòmats
la substitueixen per EPROM ( s’enregistrem elèctricament
i s’esborren per raig ultra violats, podent-se tornar
a enregistrar de nou).
|

Autòmats
Modicon
de
Schneider
|
| Tipus
de Memòries |
Com
es programen? |
Com
s'esborren? |
Que
passa quan falta l'alimentació elèctrica? |
| RAM |
Elèctricament |
Elèctricament |
s'esborren
ja que són volàtils. |
| ROM |
a
fabrica. |
No
es pot |
es
mante la informació |
| PROM |
Elèctricament |
No
es pot |
es
mante la informació |
| EPROM |
Elèctricament |
Raig
ultraviolats |
es
mante la informació |
| EEPROM |
Elèctricament |
Elèctricament |
es
mante la informació |
|
|
| |
Quines
són doncs les funcions de la CPU? |
| Bé,
ja he comentat abans que en la memòria ROM
del Sistema el fabricant enregistra el Programari del Sistema
o Firmware. Aquests programes són
els que consultarà el microprocessador per dur a terme
les funcions a ell encomanades. En general tot
Programa de Sistema incorporarà: Les funcions
de supervisió i control del temps de cicle, taula de
dades, alimentació, bateria, etc.... Un autotest d’arrancada.
El control d’execució de programa. La generació
del cicle de base de temps. Les funcions de comunicació:
interna, externa amb la unitat de programació i/o els
perifèrics i/o altres automats i/o altres PC’S
als que pugues estar connectat. |
|
| |
Memòries
de copia o de programes d’usuari. |
| Les
memòries EPROM I EEPROM apart de les
aplicacions abans mencionades es solen fer servir com memòries
de copia per l’enregistrament i arxiu de programes d’usuari. |
|
| |
Unitats
de programació. |
| En
mode programació: per cercar instruccions
de programa, per cercar posicions de memòria, per esborrar,
inserir i modificar instruccions, per detectar errors de sintaxis,
visualitzar la totalitat o part del programa contingut en
la memòria d’usuari, forcar de terminats estats
de temporitzadors, comptadors, etc...
En mode d’enregistrament: per enregistrar
en suports magnètics (discs flexibles o el disc dur
d’un PC), per enregistrar memòries EPROM o EEPROM,
per imprimir,...
En mode de servei: per posar el sistema
en marxa ( RUN, ON-LINE), per aturar el sistema ( STOP, OFF_LINE),
per monotoritzar el funcionament del sistema...
|
Els
equips o unitats de programació són
els elements que utilitzaran els programadors per introduir
les instruccions de programa en la memòria
d’usuari, tot i que també les empraran per altres
funcions: |
Tres
són el tipus d’unitats de programació
que es solem emprar: les més elementals les
que semblen una calculadora, les consoles i la programació
des de PC.
-
Amb
les primeres només podrem programar l’autòmat
a base de nemònics, tot i que algunes incorporen
la possibilitat de programar gràficament però
visualitzant només unes quantes línies (més
aviat poques).
-
Les
consoles de programació tot i no poder-se comparar
amb la programació des de PC, ja permeten la visualització
de 20 o 30 línies i 60 o 80 caràcters per
cada una d’elles. Els llenguatges de programació
que podrem fer servir vindran delimitats pel software
del fabricant.
-
Amb
un PC podrem programar els autòmats sense cap altra
limitació que la pròpia del software facilitat
pel fabricant de l’autòmat, tot i que generalment
ho podrem fer de totes les maneres possibles: amb nemònics,
amb diagrames de contactes, amb gracfet.... Segurament,
inclouran modes de simulació per a poder testar
els programes, etc...
|
Autòmat
Compacte Nano de Schneider
|
| |
Unitats
de comunicació |
| Mentre
no aparegui un estàndard mundial que defineixi
el mode de funcionament ideal dels bussos de comunicacions
industrials podem trobar dos grans dominadors:
l’europeu Profibus (impulsat pels alemanys)
i el nord-americà Foundation Fieldbus.
Però
què és un fieldbus? Doncs és
un enllaç de comunicacions pensat per
a entorns on es requereix que els temps
de resposta dels senyals sigui petit, però
que a l’hora sigui molt resistent al soroll
electromagnètic ( no hem d’oblidar que
aquests bussos podran discórrer en instal·lacions
on es generaran grans camps magnètics). Un
fieldbus mantindrà un rendiment òptim amb aplicacions
que intercanviïn petites quantitats de dades
(de l’ordre d’uns pocs bytes) assegurant
uns temps de resposta d’uns pocs mil·lisegons.
El
gran problema és que al mercat es troben una
gran varietat d’estàndards.
Cada fabricant de fieldbus ha definit
la seva pròpia pila de protocols que,
en el cas dels fieldbus, solen incloure la capa física,
la d’enllaç i la d’aplicació del
model OSI. Per tant, es fa difícil saber quin
és el bus amb millor rendiment i per tant
quin adoptar, per no parlar de les incompatibilitats
entre elements o mòduls de diferents fabricants. I
el que és pitjor cada fabricant vol imposar el seu...
Davant d’aquesta dificultat, i de la
impossibilitat d’arribar a un conveni entre tots els
fabricants per tal d’especificar un estàndard
mundial, alguns d’ells comencen a tenir en compte
alternatives. La utilització d’una Ethernet
amb millores, evidentment, per tal de poder suportar un ambient
industrial està cobrant gran força. Com no,
internet, JAVA i les targes de comunicació
TCP/IP estàndards i a l’hora
barates jugaran un gran paper en les comunicacions
industrials.
Temps
al temps.
|
En
un entorn de treball industrial, es fa necessari
interconnectar els diferents elements que en
formen part. La connexió de
dispositius com els autòmats,
els sensors, els actuadors
i altres elements integrants com per exemple els PC’S
per tal de controlar i monitoritzar estan a l’ordre
del dia.


Autòmats
Modicon de Schneider
|
| Cal
dir també que la majoria d'autòmats
incorporen ports sèrie per tal de comunicar-se
amb consoles de programació, enregistradores de memòries,
PC'S, etc. |
|
| |
Perifèrics. |
Entendrem
com a perifèrics, els elements independents als autòmats
que puguem fer servir en algun moment i que tinguin certa
importància en el sistema.
Autòmats
Modicon de Schneider
|
 |