Mars Pathfinder
Fotografías: Julio, 1997
All photos NASA.

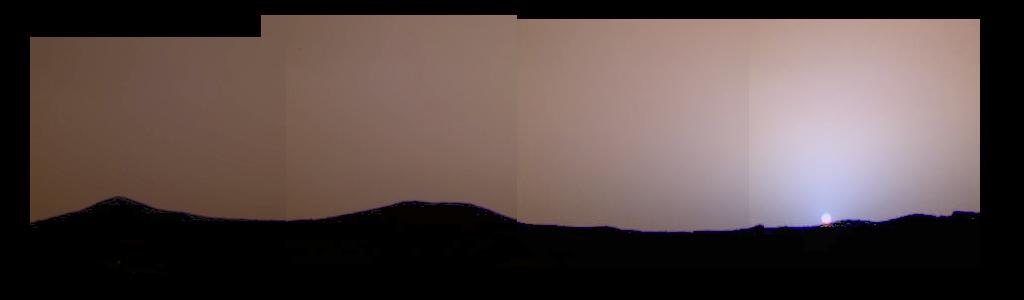
Julio 28 (Sol 24) |
Ampliación del horizonte oeste en el atardecer del
Sol 24. Los colores son aproximadamente reales, como se verían a
simple vista. En realidad, el Sol, que aquí aparece sobreexpuesto,
se vería blanco o ligeramente azulado. |

Julio 28 (Sol 24) |
Esta imagen de una puesta de sol marciana obtenida el Sol
24 muestra mucha más variación cromática que las imágenes
previas. El color azul no es debido a nube alguna, sino al polvo. Aunque
absorbe luz azul, dando al cielo marciano el color rojo característico,
también dispersa algo de luz azul, que se percibe sólo alrededor
del Sol y al amanecer o al aterdecer, cuando la luz tiene que atravesar
mayor grosor de atmósfera polvorienta. |

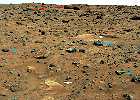
Julio 27 (Sol 23) |
La cámara IMP captó esta imagen del Rover
cavando en el material blando cerca de Casper para determinar las propiedades
mecánicas del suelo. Shaggy es la roca grande que se ve detrás
del Rover. |
 |
La cámara delantera derecha del Rover obtuvo esta
imagen cuando este se encontraba al lado de la roca "Pooh bear", que se
ve a la izquierda, mirando hacia la duna "Mermaid Dune". Los experimentos
de excavación mediante las ruedas del rover pusieron de manifiesto
que bajo las zonas de polvo transportado por el viento, de color claro,
hay tierra de color oscuro. |

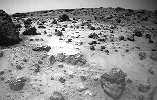
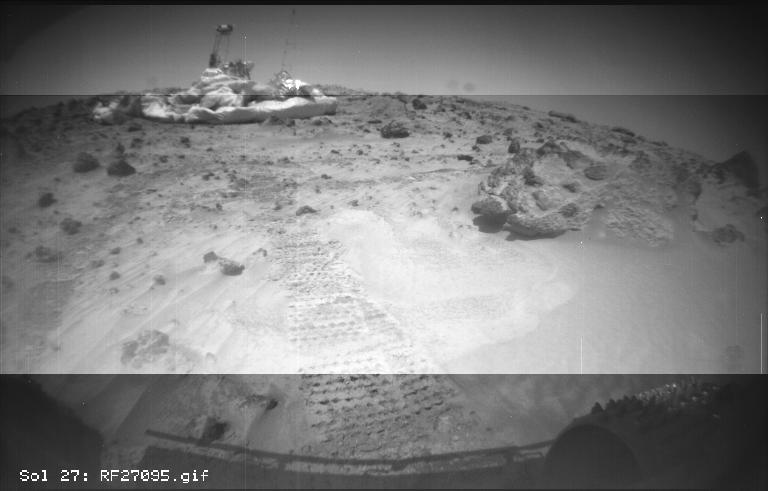
Julio 30 (Sol 27) |
Una roca peculiar llamada Squash
Imagen obtenida el Sol 27 por la cámara delantera derecha del rover
Sojourner. El lander se ve a la izquierda del centro. La roca grande de
la derecha, apodada "Squash", tiene aspecto heterogéneo, como si
se tratase de un conglomerado. Podría tratarse de una brecha volcánica. |

Julio 29 (Sol 26) |
El Lander y la roca Mini Matterhorn
Imagen obtenida el Sol 26 por una de las cámaras delanteras del
rover Sojourner. En el lander se ve, de izquierda a derecha, el mástil
ASI/MET (Atmospheric Structure Instrument/Meteorology Package) con los
medidores del viento, la antena de baja ganancia, la cámara IMP
(Imager for Mars Pathfinder) en su torreta, en la parte central, la antena
de alta ganancia, con forma de disco, a la derecha, y parte de los airbags
desinchados. El círculo oscuro en el cuerpo del lander es una rejilla
con un filtro que permite el paso de aire, hacia el exterior en el lanzamiento
y hacia el interior en el aterrizaje. La antena de alta ganancia apunta
hacia la Tierra. La roca Yogi se ve semioculta por los airbags, a la derecha.
Mini Matterhorn es la roca grande de la izquierda. En la parte inferior
se ve la sombra del rover Sojourner y de su antena. |
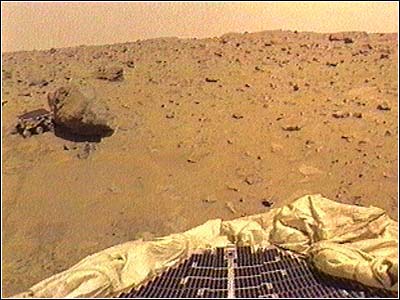
Julio 29 (Sol 26) |
La roca del oso Pooh y la duna de la Sirena
Imagen obtenida el Sol 26 por una de las cámaras delanteras del
rover Sojourner. A la izquierda se ve la roca apodada "Pooh Bear", de unos
10 cm de altura. La duna de la sirena (Mermaid Dune) es la zona lisa que
se extiende horizontalmente en el cuarto superior de la imagen. Después
de analizar la duna con el APXS (Alpha Proton X-Ray Spectrometer), el rover
utilizará sus ruedas claveteadas para remover el suelo. |

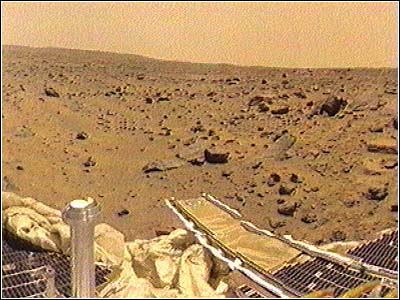
Julio 28 (Sol 25) |
El Lander, mirando hacia el oeste
Imagen obtenida el Sol 25 por una de las cámaras delanteras del
rover Sojourner. El objetivo ojo de pez de la cámara produce un
efecto de gradiente de luz en el cielo en esta vista hacia poniente. La
imagen aparece granuda por la pobre resolución de 3 miliradianes
(.018 grados) por pixel. El campo visual es de unos 127 grados en horizontal
por 90 grados en vertical. |

(Sol 3) 82K
1 Mbyte, gran formato: 82475f.jpg |
|
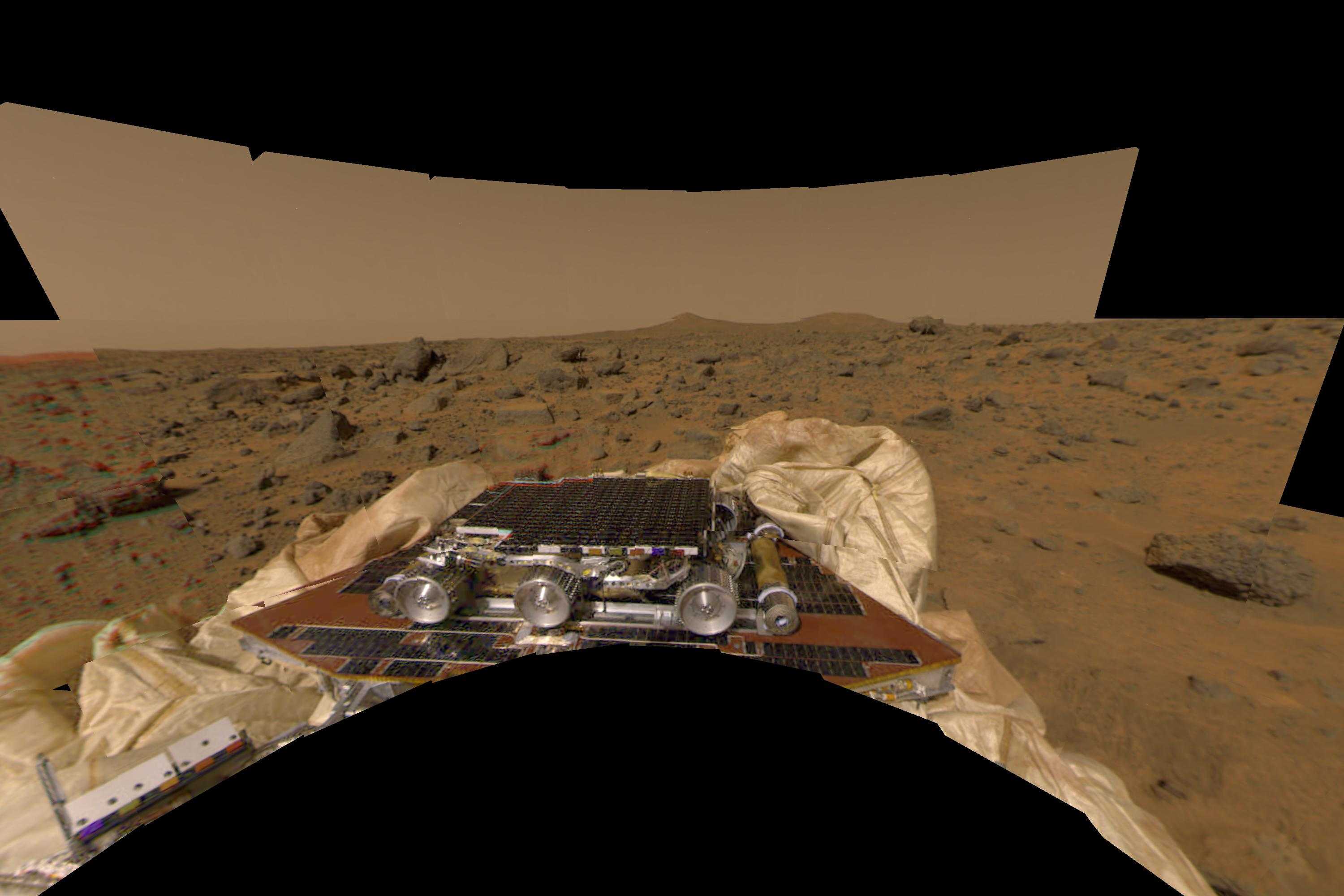
Panorámica 3-D de 360 grados
Esta panorámica tridimensional se obtuvo mediante la cámara
IMP (Imager for Mars Pathfinder) el Sol 3. Para verla correctamente se
precisan gafas especiales con un filtro rojo en lado izquierdo y azul en
el derecho. Se ven los tres pétalos, los airbags desinchados, el
rover Sojourner y las dos rampas. En el horizonte destacan las colinas
Twin Peaks. El rover investigó durante los dias siguientes la roca
que se ve a su izquierda: Barnacle Bill, y la que está poco más
lejos, a la derecha, apodada Yogi.
L cámara IMP se encuentra a 1,8 m de altura sobre el suelo marciano
y tiene una resolución de 2 mm a una distancia de dos metros. Cada
uno de los dos objetivos va equipado con un juego de 12 filtros. Sorprende
la claridad con que se aprecia Yogi y la cresta que hay delante del pétalo
de la izquierda. La deformación y los fallos de alineación
son debidos a errores de paralaje. |
|
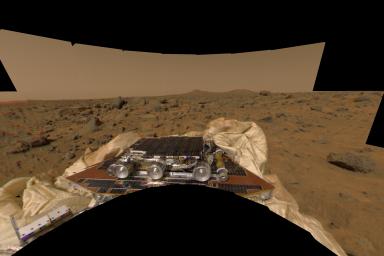 |
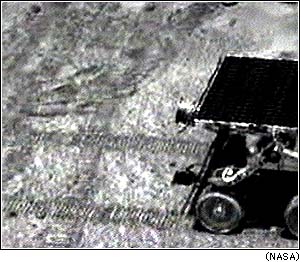
Nueva perspectiva del rover aparcado
Esta imagen ofrece una perspectiva realista de una de las primeras fotografías
obtenidas por la cámara IMP (Imager for Mars Pathfinder) poco después
del aterrizaje a las 10:07 AM (Pacific Daylight Time) el 4 de julio de
1997. El rover se encuentra aparcado sobre uno de los paneles solares.
Las rampas todavía no se habían desplegado. Las colinas gemelas
llamadas "Twin Peaks" se distinguen en el horizonte. |
 |
La rueda delantera derecha del rover Sojourner se ve pasando
sobre la roca Hassock. La piedra del fondo es Wedge (cuña). |
 |
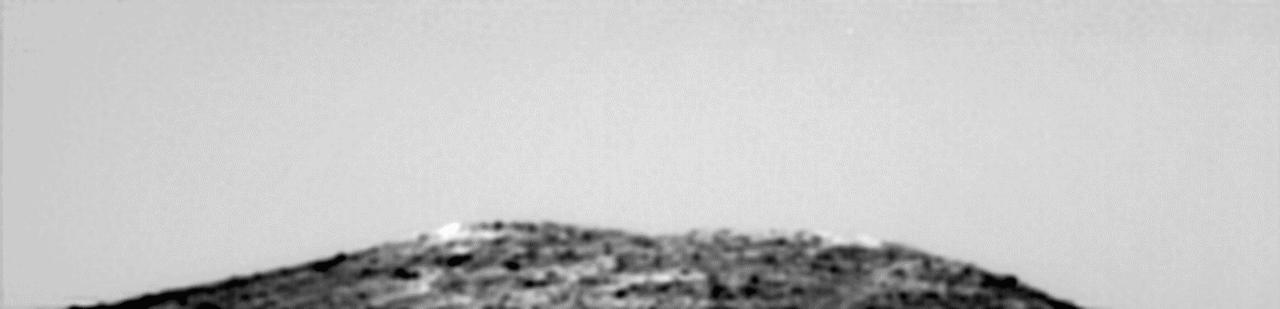
Imagen mejorada del Pico Norte (uno de los Twin Peaks)...
Se obtuvo por combinación de 25 imágenes
prácticamente idénticas obtenidas con la cámara IMP,
utilizando una técnica llamada de super-resolución y desarrollada
por Peter Cheeseman, Bob Kanefsky, Robin Hanson, y John Stutz en la Ames
Information Sciences Division de la NASA. |
 |
Imagen mejorada de la roca Wedge...
Se obtuvo por combinación de 25 imágenes
prácticamente idénticas obtenidas con la cámara IMP,
utilizando una técnica llamada de super-resolución y desarrollada
por Peter Cheeseman, Bob Kanefsky, Robin Hanson, y John Stutz en la Ames
Information Sciences Division de la NASA. |
 |
Imagen mejorada de un cráter cercano (Big Crater).
Por casualidad, se ve también un objeto brillante: el escudo protector.
Se obtuvo por combinación de 25 imágenes
prácticamente idénticas obtenidas con la cámara IMP,
utilizando una técnica llamada de super-resolución y desarrollada
por Peter Cheeseman, Bob Kanefsky, Robin Hanson, y John Stutz en la Ames
Information Sciences Division de la NASA. |
 |
Imagen mejorada de la roca Rindstone...
Se obtuvo por combinación de 25 imágenes
prácticamente idénticas obtenidas con la cámara IMP,
utilizando una técnica llamada de super-resolución y desarrollada
por Peter Cheeseman, Bob Kanefsky, Robin Hanson, y John Stutz en la Ames
Information Sciences Division de la NASA. |
 |
Versión tri-dimensional de la Sagan Memorial Station
vista desde el Sojourner Rover. Se obtuvo combinando las imagenes de las
dos cámaras del rover con filtros rojo y azul. |
 |
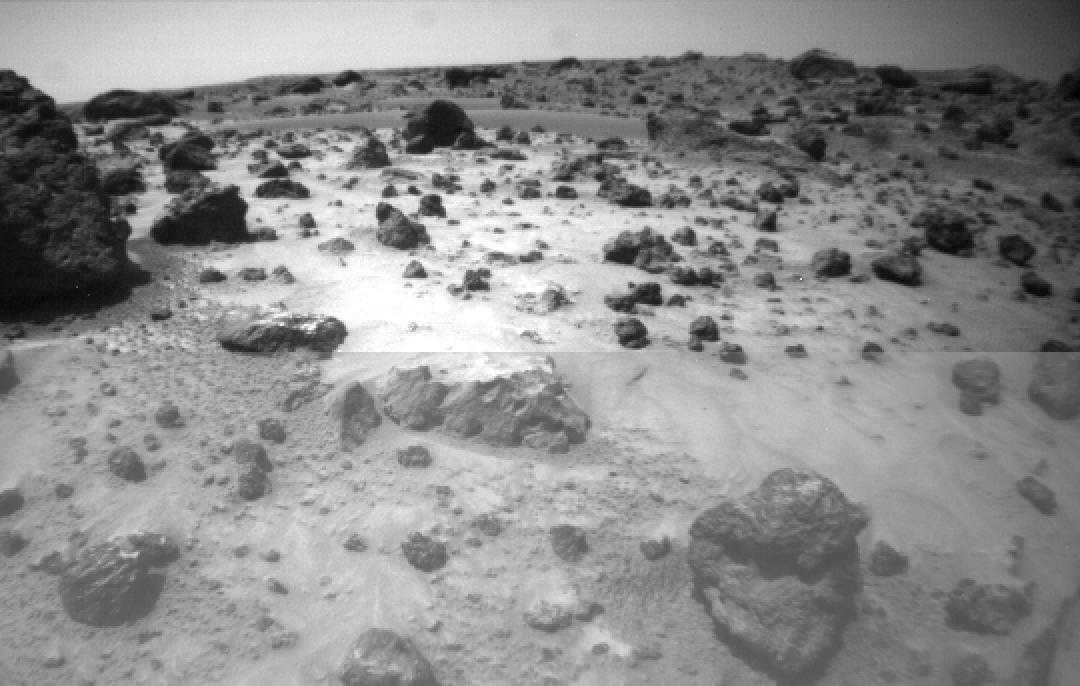
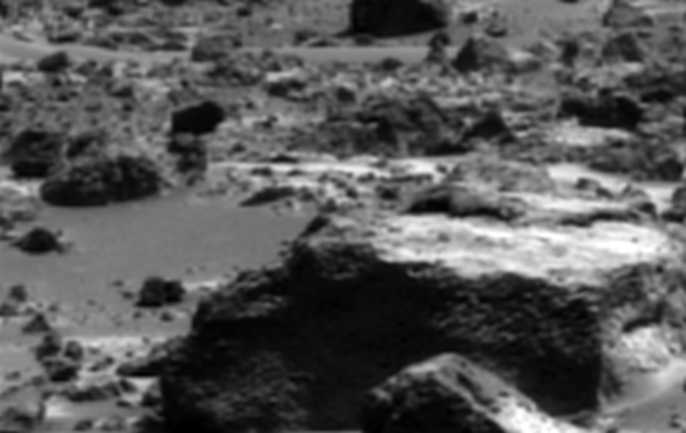
Vista desde la estacion Sagan hacia el noreste. Las flechas
rojas marcan la posición de rocas redondeadas, posiblemente modeladas
por el agua. Las flechas azules señalan algunas rocas angulosas,
que quizá provengan de cráteres de impacto cercanos, o de
antiguos volcanes. Las zonas de color claro (Scooby Doo, por ejemplo) se
supone que consisten en depósitos evaporíticos, o materiales
conglomerados al evaporarse el agua. |
 |
Esta imagen es la más clara de Yogi, con el Sojourner
Rover aplicando a la roca su Alpha Proton X-ray Spectrometer . Se
distinguen con claridad las dos coloraciones, una más rojiza encarada
hacia los lugares de donde vienen los vientos predominantes y otra más
'azulada', a sotavento. |
  |
Imágenes en color mejorado y filtrado (stretched),
elaboradas por el Dr. Timothy Parker. Se ven claramente las marcas oscuras
que la Pathfinder, cubierta de airbags, hizo en el suelo al rebotar y rodar,
desplazando algunas piedras. |
 |
Imagen que muestra la colina de la derecha de las Twin Peaks,
con un detalle sin precedentes. Se aprecia cierta estratificación. |
 |
Huellas en el suelo. |
 |
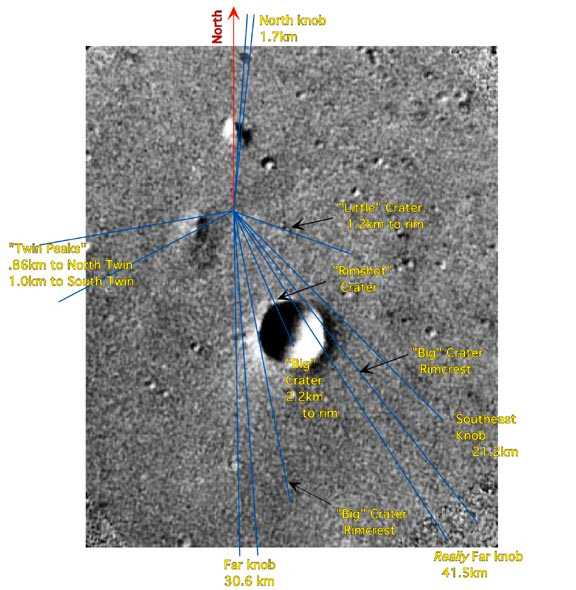
¿Dónde está la Mars Pathfinder?.
También puede ver una versión
sin reducir de esta imagen que muestra la localización exacta
del lugar de aterrizaje.
(foto: Viking Orbiter) |
 |
Animación de las maniobras del rover para acercarse
a "Yogi" (Sol 10)
[1378 K] |
 |
Animación del rover descendiendo por la rampa
[517 K] |
 |
Animación (haga clic) que muestra la puesta de Sol
en Marte. Se obtuvo a partir de 9 imágenes mejoradas (el color no
es real) para mostrar pequeños cambios de iluminación debidos
a la presencia de capas con más abundancia de polvo. En la primera
imagen, que es la que se ve aquí, el Sol se encuentra a la derecha
a punto de ponerse. La secuencia muestra los cambios a lo largo de una
hora. La intensidad de la luz al final es apenas el 1 % de la inicial,
pero la cámara IMP se adaptó perfectamente. El crepúsculo
es
muy largo a causa de que hay mucho polvo a gran altura. |
 |
Esta imagen muestra Deimos, la luna menor de Marte, tal
como la captaron las cámaras de la Mars Pathfinder durante su tercera
noche en el planeta Rojo. En ralidad, Deimos debería ocupar sólo
dos pixels en la imagen, pero se ve de mayor tamaño a causa de la
mala calidad de la imagen. Se intentará obtener su espectro para
deducir la composición. Deimos es difícil de observar desde
la Tierra o con el telescopio espacial Hubble, por su cercanía a
Marte. |
Panorámica QuickTime
VR de la the Sagan Memorial Station


















{kind=link}
{kind=link}