SEGUIDOR LÍNIES OPENROBERTA (R3.0.4 ind)
Es vol simular el transport dels blocs al llarg de riu amb un robot virtual anomenat Open Roberta, i en arribar al port de Gizeh els portarem fins a l'esplanada amb el robot Spike.
Que hem de fer?
*Tasca en grups
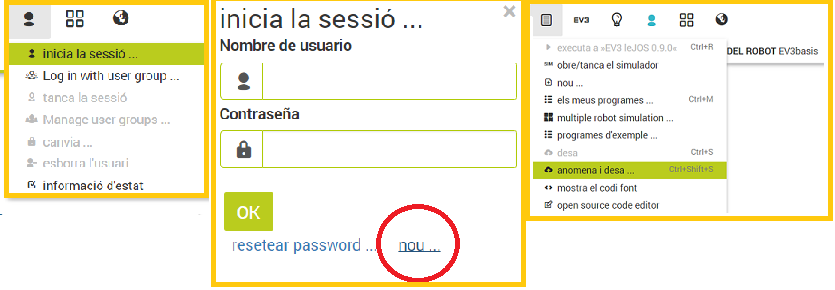
1 Descarregar el manual de registre d'OpenRoberta
2 Fer el programa seguidor de línies OpenRoberta: A partir de l'algoritme cal investigar i crear un programa que permeti al robot seguir la línia.
3 Fer un informe individual que inclogui:
- Diapositiva 1 tapa de presentació : Inclou noms enllaç carpeta OneDrive d'aquesta presentació
- Diapositiva 2: 'enllaç d'OneDrive o _Youtube de e la captura del vídeo de seguirdor de línies.
FASE DESENVOLUPAMENT
TRANSPORT DES DE LA CANTERA OPENROBERTA (R3.1.1)
Que hem de fer?
*Tasca en grups
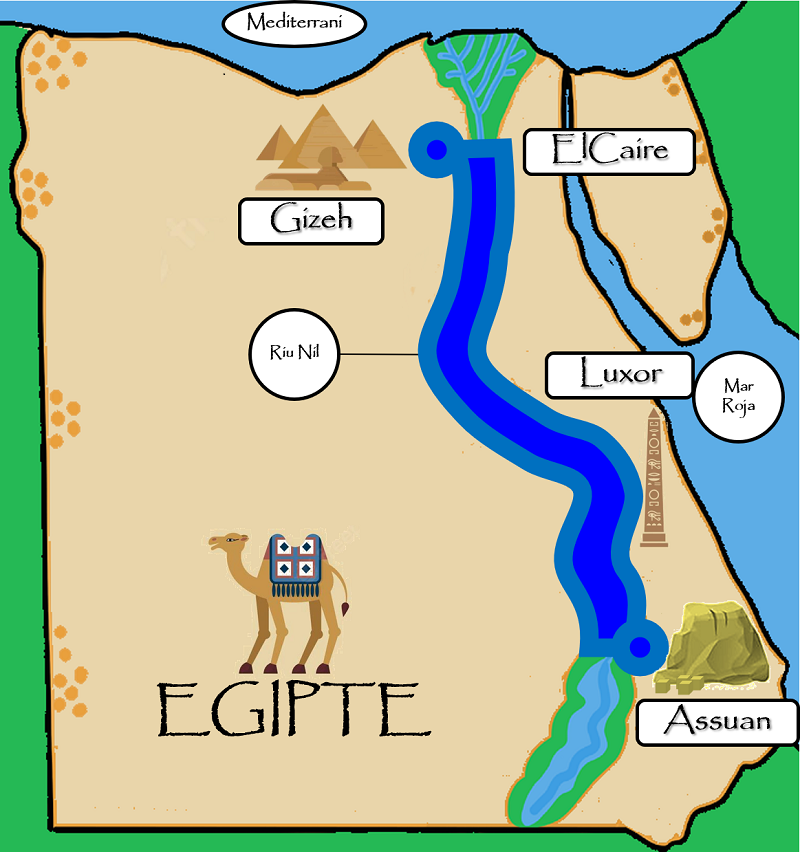
Es vol simular amb OpenRoberta un robot que transporti les roques amb les que es construeixen les piràmides. Cal anar i tornar des del port de l'esplanada de les piràmides de Gizeh, Riu Nil amunt fins les canteres de pedra d'Aussan
Podeu utilitzar el compte d'Open Roberta: escolagarbi contra: esplugues. Recordeu desar el programa
Cal pujar al vostre compte d'OpenRoberta aquesta imatge ----->
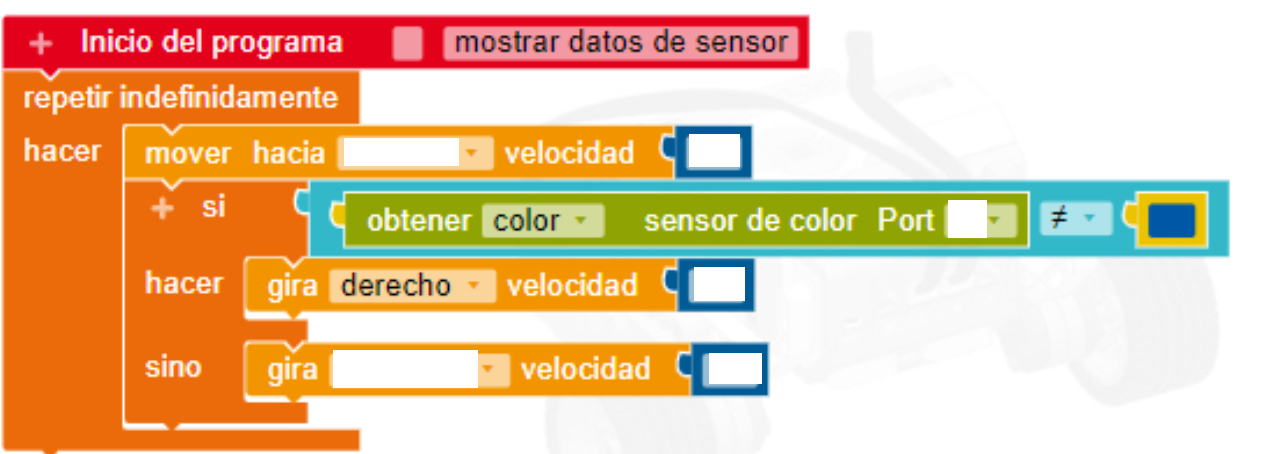
Feu una programació introduint les dades i semblant a aquesta:
DESCÀRREGA I CONSTRUCCIÓ SKIPE (R3.1.2)
Que hem de fer?
*Tasca en grups
Es vol construir i programar un robot Spike amb una pinça amb sensor d'ultrasó que recolli i transporti les roques des del riu fins l'esplanada de les piràmide de Gizeh.
I fer una construcció de la pinça amb una programació bàsica com la del exemple o un altre.

BUSCA L'ENTRADA DE LA PIRÀMIDE. OPENROBERTA (R4.1.1)
*Tasca en grup
Que hem de fer?
Es vol simular amb OpenRoberta un robot que faci el recorregut extern entorn de les piràmides fins trobar el passadís d'entrada blocat amb un gran bloc de roca.

|

Recorregut: càrrega de pedres, descàrrega a la piràmide

Mostra d'exemple de xàssis+pinça recolectora de pedres amb sensor US

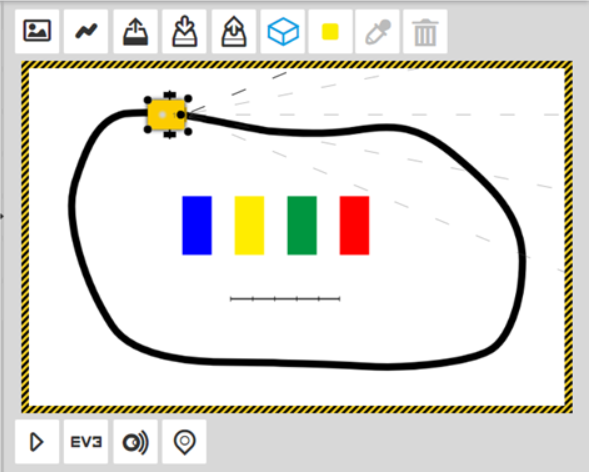
Recorregut del simulador del robot

Cal pujar al vostre compte d'OpenRoberta aquesta imatge ----->

|