Al llarg de la historia les curses han estat un dels espectacles que més atreu a tothom. Fa uns 2500 anys a l'Antiga Roma la velocitat i el risc ja van fer famoses les curses de dos i quatre cavalls (biga i quadriga), convertint-les en uns dels més famosos espectacles del Circ Romà.
Aquestes curses eren tant espectaculars que fins i tot van inspirar curses com les de beines de Star Wars. Avui en dia també tenim curses de cotxes de ralli o Formula-1, però afortunadament no són tant perilloses
INDICADORS D’AVALUACIÓ
4.5.1 CLIL
5.4.1 Programació del robot
5.4.2 Disseny del robot.
7.2.4 Gestió de documents (títol, noms, format PDF, accessible al professor). Diari d'aprenentatge
8.1.1 Expressió oral. Presentació
10.22 Predisposició per la feina. Diari d'aprenentatge
OBJECTIUS
L'activitat principal de la sessió és assolir el repte en equip, presentar-la als companys i afegir l'entrada corresponent al Diari d'aprenentatge.
• Objectiu 1: Dissenyar un robot bàsic equipat amb sensors de contacte per que recorri un circuit rebotant” contra les parets.
• Objectiu 2: Es vol programar un robot Spike mòbil bàsic equipat amb sensors d'ultrasons per que pugui recórrer un circuit envoltat d’una tanca sense xocar contra les parets.
FASE INICIAL
Creació de grups i carpeta OneDrive compartida amb l'equip i professor (R5.01/02)
Realitzarem els reptes utilitzant sensors de contacte per acabar amb sensors que puguin "veure" el seu entorn.
Autoxocs (R5.1)
El primer repte consistirà en afegir un sensor de força al robot i programar-lo per que “reboti” contra les parets
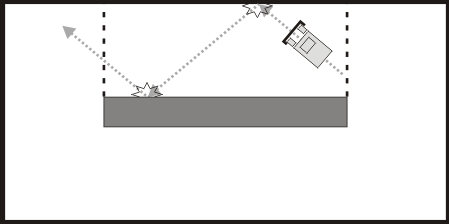
Evitaxocs (R5.2)
Substituirem els sensors de contacte per sensors d’ultrasons per programar-lo per que pugui girar abans de xocar contra les parets. L'estratègia bàsica amb un robot bàsic de dos motors i dos sensors de contacte al davant està representada en aquest ALGORITME:
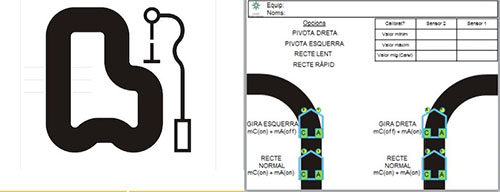
Fòrmula 1 (R5.3)
Finalment utilitzarem els sensors de llum i els posarem sobre un circuit pintat al terra per circular pel seu interior .
Fer un circuit amb peces de colors, situant les peces de colors a 1 rotació de la següent. El robot s'aturarà i anirà apartant les peces quan vagi avançant.
Posar diferents semàfors de colors en un circuit amb diferents instruccions a realitzar pel robot
Fer un circuit amb fulles o tires de diferents colors on el robot anirà executant les instruccions associades al sensor de color...