|
Automatització d'un selector de peces metàl·liques |
|
|
|
|
| Data: Juliol 2003 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Objectiu del projecte |
|
|
|
|
|
|
Material i equipament |
|
|
|
|
|
|
Descripció del projecte i funcionament |
|
|
|
|
|
|
Esquemes / dibuixos / fotos |
|
|
 |
|
|
 |
|
|
 |
|
|
|
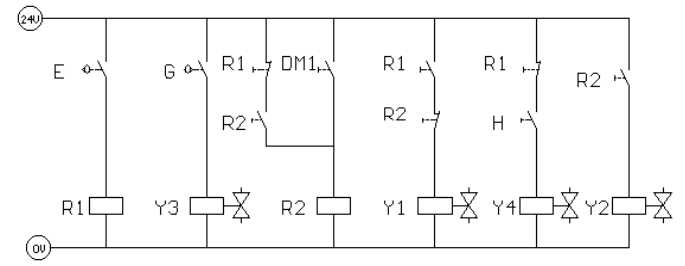
Esquema elèctric del
projecte anterior
|
|
|
|
|
|
|
|
|
|
Possibles millores |
|
|
|
|
|
|
Valoració / conclusions |
|
|
|
|
|
|
|
|
|
|
|
|
|