|
Construcció
d'un seleccionador de peces
|
|
|
Descripció
i característiques del projecte
|
Data : Juliol 2003
|
|
RESUM DEL PROJECTE
APLICAT AMB L'EQUIP D'ELECTROPNEUMÀTICA
|
|
|
Autors:
|
| Toni Hernández
tonihdez56@hotmail.com IES La Garrotxa (Olot) |
| Jordi Esquís
jesquis@eresmas.com IES Cendrassos (Figueres) |
| Eduard de la Harada
eaj@eresmas.com IES La Garrotxa (Olot) |
| Jaume Giró
jgiro3@pie.xtec.es IES Puig Cargol (Calonge) |
| Data: 4/7/2003 |
|
Nivell/cicle/crèdit:
Batxillerat Unitat Didàctica: Automatització
de processos
|
|
Temps aprox.: 6 hores
|
|
|
Objectiu del projecte |
|
-
Mitjançant l'automatització,
controlar un procés de selecció de peces metàl·liques
i plàstiques.
|
|
Requeriment (especificacions
tècniques) |
|
-
El sistema ha de discriminar
les peces metàl·liques i seleccionar les plàstiques,
i no ha d'actuar quan no hi ha peça.
|
|
Material i equipament |
|
1 Cilindre de simple
efecte accionat manualment mitjançant palanca. EDU-A1-1
2 Cilindre de doble efecte
accionat per electrovàlvula. EDU-A1-2
1 Ventosa accionada per
electrovalvula. EDU-A1-3
1 Mòdul bufador-expulsor
accionat per electrovàlvula. EDU-D2-4
1 Distribuïdor de pressió
de 6 sortides, amb vàlvula de tall incorporada EDU-A3-7
3 Detector Magnètic
de contacte obert EDU-B2-4
1 Interruptor Inductiu de
contacte obert EDU-B2-5
1 Interruptor Rodet amb
un contacte obert i un tancat EDU-B2-6
1 Mòdul Relé
de 4 contactes commutats EDU-B2-8
2 Distribuïdor 5/2
biestable d'accionament elèctric 24V CC de 24W EDU-B2-3
1 Distribuïdor 5/2
monoestable d'accionament elèctric 24V CC de 2W EDU-B2-1
2 Unions T de 4 mm EDU-C1-4
3 Tap de 4 mm EDU-C1-5
1 Mòdul Alimentació
Peces EDU-D2-3
1 Mòdul Maquetes
3D EDU-D2-2
1 Font d'alimentació
EDU-C1-6
5 Peces Cilíndriques,
5 de nylon i 5 d'alumini EDU-D3-10
|
|
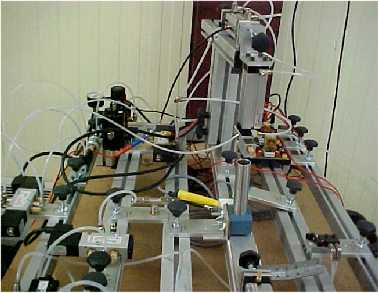
Descripció del
projecte |
|
-
Per posar en funcionament l'equip,
hem d'accionar la palanca S1 i tornar-la a la seva posició inicial.
-
Amb això estem activant
el cilindre A de simple efecte amb retorn per molla.
-
Quan la peça arriba a
la zona de detecció, un final de cursa que actua mitjançant
un interruptor amb rodet sobre el cilindre A fent-lo retornar a la
seva posició inicial.
-
Un cop la peça està
en la zona de detecció, es discriminarà si és metàl·lica
i es seleccionarà si no es metàl·lica.
-
Un sensor capacitiu detecta
la presència de la peça, i un sensor inductiu detecta si
és metàl·lica.
-
En el cas d'un peça metàl·lica
els dos sensors s'activen i aleshores entra en funcionament el bufador
que expulsa la peça de la zona.
-
En l'altre cas tindrem el sensor
capacitiu activat i el inductiu desactivat i es començaran a moure
els cilindres B i C.
-
Degut a que el sensor inductiu
ens proporciona un contacte NC es transforma amb un NO aprofitant els contactes
d'un relé.
-
Una vegada els cilindres B i
C han situat la ventosa sobre la peça, mitjançant uns
sensors magnètics s'activa aquesta ventosa i captura la peça
portant-la al contenidor de peces no metàl·liques
|
|
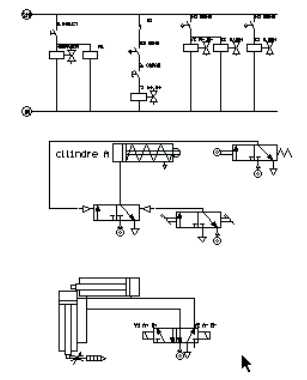
Esquemes /dibuixos/ fotos. |
|
|
|
|
|
|
Possibles millores
|
-
Aquest sistema es podria millorar
automatitzant el dispensador un cop s'hagi iniciat i finalitzar el procés
un cop no es detectin més peces.
-
També es podria posar
una parada d'emergència per tal d'aturar el mecanisme davant algun
incident.
|
Valoració / conclusions |
|
-
Realitzar aquest muntatge ens
ha permès conèixer l'equip d'electropneumàtica
així com les seves limitacions en processos seqüencials i en
les dificultats d'us dels sensors en el sentit del posicionament dels mateixos.
-
En el nostre cas ens ha permès
aprofundir en coneixements pràctics de pneumàtica, trobant
aplicacions pràctiques possibles a la indústria, que alhora
són realitzables en petita escala a l'aula de tecnologia.
|
|
|
|
|
|