|
PONT
DE BISCAIA
|
|
Descripció
i característiques del projecte
|
|
| Data: Novembre 2004 |
|
|
RESUM DEL PROJECTE
|
|
|
Autors:
|
|
Yolanda Fortun
yfortun@terra.es
IES Montsoriu (Arbúcies)
|
|
Encarna Garcia encarna_tecno@yahoo.es
IES Vinyes velles (Montornès)
|
|
Adrián
Gómez Morenoí
agomez44@pie.xtec.es IES Leonardo
da Vinci (Sant Cugat del Vallès)
|
|
Sílvia Leiva
Hevia
sleiva3@pie.xtec.es IES Lliçà dAmunt
Lliçà dAmunt
|
|
Data: 24/11/04
|
|
Nivell/cicle/crèdit:
3 é dESO
|
|
Temps aprox.:
40 hores
|
|
|
| Objectiu del projecte |
|
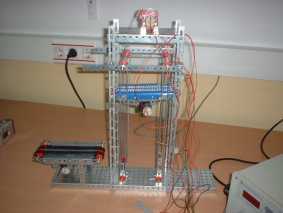
-
El nostre projecte està
inspirat en el pont de Biscaia que es troba entre Portugalete i Las Arenas
(Getxo) .És una mena de transbordador que transporta tant persones
com vehicles duna riba laltre.
|
|

|
|
| Requeriments |
|
-
El transbordador funciona amb
un motor de 4,5 V.
-
Mitjançant un commutador
d'encreuament variem el sentit del corrent, i per tant, el sentit de gir
del motor.
|
|
| Objectius curriculars
treballats |
|
-
Realització doperacions
de trepat, tall, soldadura, amb les màquines eina, etc., disponibles
a laula.
-
Utilització de símbols
elèctrics normalitzats en representacions de circuits elèctrics.
-
Realització desquemes
de circuits elèctrics.
-
Valorar els avantatges i els
inconvenients de l'ús d'objectes, processos tecnològics i
recursos naturals
-
Realització de projectes
dobjectes senzills seguint els passos del procés tecnològic:
projecte, construcció i avaluació.
-
Elaboració de la memòria
utilitzant un mitja informàtic i telemàtic per a la planificació,
producció, difusió i presentació del projecte.
-
Adquirir i valorar el sentiment
de satisfacció produït pel fet de poder solucionar problemes
i perseverar en la superació de les dificultats pròpies del
procés.
|
|
| Material i equipament |
|
Material:
1 motor de 4,5 V amb caixa reductora,
eix 3 mm.
6 cables de connexió.
1 commutador dencreuament.
2 finals de cursa
1 Font dalimentació
1 roda dentada de D=60
mm.
1 roda dentada de D=40
mm.
1 Adaptador per la roda dentada
4 Rodes.
2 Barretes roscades
4 Dolla de topall amb virolla
1 Planxa de polistirè
foradada en forma dU de 75x150x2mm
2 planxes de muntatge foradades
de 170x 500x 1mm
4 planxes de muntatge estreta
de 95x500x1mm
6 tires metàl·liques
amb doble filera de ranures de 30x500x1.5 mm
8 tires metàl·liques
foradades de 15x500x1.5mm
14 peces de tires metàl·liques
foradades de 15x180x1.5mm
60 cargols M4
60 femelles M4.
8 peces metàl·liques
foradades en escaire.
8 volanderes dentades
1 Placa de plàstic
1 Planxa de xapa de 300x150mm
16 reblons dalumini de 4 mm
Estany
|
Equipament:
Regla metàl·lica
Soldador
Alicates pela - fils
Trepant sobretaula
Plegadora de plàstic
Tornavís
Clau fixa
Tisores
Cargol de banc
Font dalimentació
Punta de marcar
Reblonadora
|
|
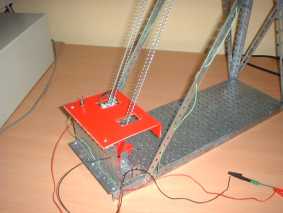
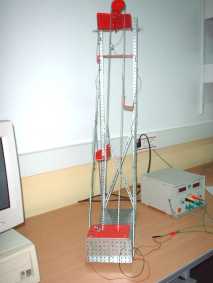
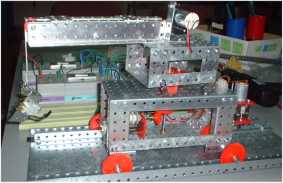
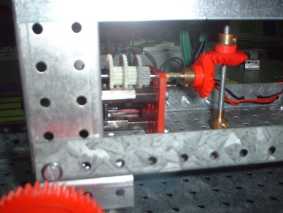
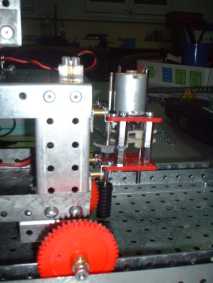
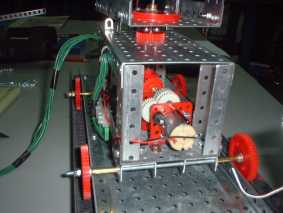
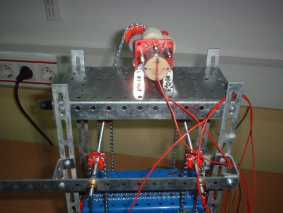
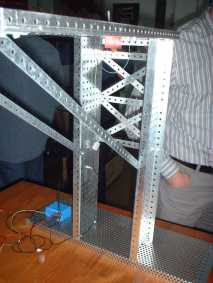
| Descripció del
projecte i funcionament |
|
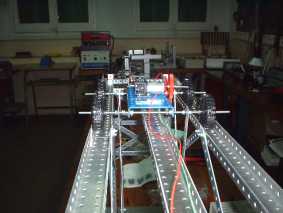
-
El projecte consisteix en la
construcció d'un muntatge electromecànic de transmissió
de moviment amb inversió de sentit.
-
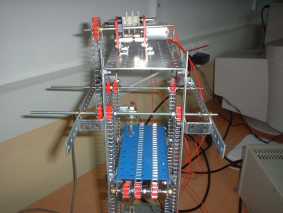
Es construeix lestructura amb
les planxes del mecano ( dues torres verticals cadascuna recolzada en una
base i unides entre sí per dos rails horitzontals en la seva part
superior).
-
Sobre els dos rails es col·loca
el petit vehicle on està fixat el motor i del que penja verticalment
la plataforma.
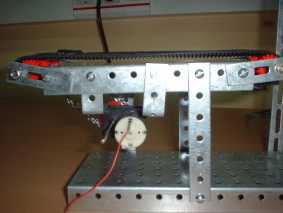
-
Es redueix la velocitat del
motor mitjançant una reductora que proporciona una velocitat adient
a la finalitat que es persegueix.
-
Existeix un quadre de comandament
que controla el sentit de la marxa.
|
|
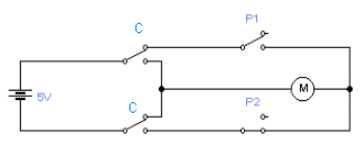
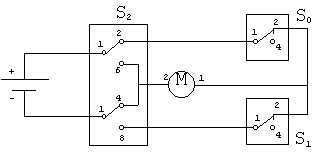
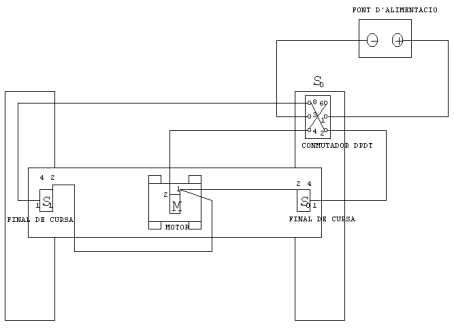
| Esquemes / dibuixos /
fotos |
|
Linterruptor d'encreuament
permet alternar la polaritat del motor de corrent continu i per tant canviar-ne
el sentit de gir. Els finals de carrera shan de connectar un normalment
tancat i laltre normalment obert per tal que el pas de corrent elèctric
al motor es talli quan el transbordador arriba al final del recorregut.
Sha de comprovar que el moviment del motor i el final de carrera que atura
el motor es corresponguin tant en el cas danada com de tornada.
|
|
|
|
|
|
|
|
| Possibles millores |
|
-
Reduir el número de peces
del mecano utilitzades per fer l'estructura o dissenyar una estructura
equivalent amb uns altres materials.
-
Es podria implementar amb una
sèrie de senyals visuals i auditives.
-
Es pot incorporar un automatisme
de control mitjançant el SADEX.
|
|
| Qüestions / activitats
d'avaluació |
|
-
Dissenyar diferents circuits
elèctrics, amb la simbologia adient, en els que s'inclogui els diferents
elements passius elèctrics.
-
Comprovació del voltatge
subministrat per la font amb el téster .
-
Utilització daltres
materials.
-
Valorar i realitzar diferents
tipus dunions: articulades, fixes,....
-
Presentar una memòria
del projecte.
-
Es pot adaptar el nivell de
dificultat del projecte a les necessitats dels alumnes (treball de la diversitat).
|
|
| Valoració / conclusions |
|
-
L'interès del projecte
rau en la integració de diferents tècniques en un únic
projecte (mecanismes, electricitat , estructures, materials, eines i utensilis,
representació gràfica,...).
-
Ha sigut el mitjà per
aprendre la manipulació de diferents eines: trepant, soldador, reblonadora,....
|
|
|
per
tornar a :
|
|
Índex
de treballs
|
| |

|
| |

|
|