|
Automatització
d'un vehicle de tres rodes per a la seva utilització com a seguidor
dun llum mòbil
|
|
Descripció
i característiques del projecte
|
|
| Data: Gener / febrer 2001 |
|
|
RESUM DEL PROJECTE
APLICAT AMB EL SADEX
|
|
|
Autors:
|
|
Rafel Listuella
rllistue@pie.xtec.es de l'IES LAmetlla del Vallés LAmetlla
del Vallés
|
|
Manoli Moreno Onieva
mmoren76@pie.xtec.es
de l'IES- LAmetlla del Vallés LAmetlla del Vallés
|
|
Marta Carnicero Hernanz
carnher@teleline.es de l'IES- Barcelona Congrés Barcelona
|
|
Data: 14-2-2001
|
|
Nivell/cicle/crèdit:
2n Cicle dESO
|
|
Temps aprox.:
20 u.l.
|
|
Objectiu del projecte |
-
Lactivitat ha de donar resposta
als objectius del segon cicle pel que fa lautomatització dun conjunt
senzill, que en el nostre cas permetrà dutilitzar un vehicle anteriorment
dissenyat pels alumnes. La intenció de lactivitat és de
dur a terme lesmentada automatització mitjançant el recurs
SADEX, que forma part de la dotació de laula de tecnologia.
Alhora, aquest treball ha de servir per a potenciar el treball en equip
|
Requeriments |
-
El vehicle ha de ser capaç
de girar a esquerra i dreta fins localitzar un llum.
-
Es desplaçarà,
un cop localitzat aquest llum, tot seguint-lo.
-
Els alumnes han de ser capaços
de dissenyar els canvis a realitzar en un vehicle ja muntat per tal dhabilitar-lo
per acomplir amb els objectius del projecte. Posteriorment, cada
grup dalumnes haurà de dissenyar el procediment dautomatització
del projecte, utilitzant els ordinadors de linstitut.
-
El fet que cada grup pugui pensar
en sistemes lleugerament diferents alhora de realitzar lesmentada automatització
es considerarà una riquesa, a més daportar la possibilitat
que els alumnes puguin aprendre de la diversitat denfocaments dels seus
companys, a més de fer-ho a través dels seus propis errors.
-
El projecte es durà a
terme amb els components referenciats dalecop, i ha estat pensat per tal
de generar una despesa mínima en el conjunt de la classe
|
Material i equipament |
-
1 maqueta de vehicle a tres
rodes, realitzada amb components tipus Meccano dalecop
-
1 Pila 4,5 V
-
2 motors corrent continu
-
1 LDR
-
1 tros de cartolina negra per
a limitar la llum que rep lLDR
-
2 LEDs de color verd
-
2 LEDs de color vermell
-
Cables de connexió (el
més llargs possible)
-
Sistema Sadex (mòdul
dentrades i mòdul de motors)
-
Eines diverses (tenalles, tornavisos,
llimes, serres, cargol de banc, claus fixes, martell)
-
Una lot
-
Un ordinador
|
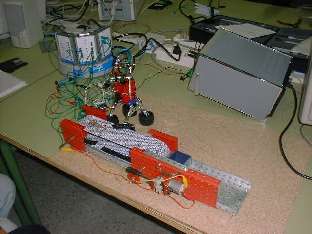
Descripció del
projecte i funcionament |
-
El projecte consisteix en una
activitat dacció complerta, que desenvolupa lautomatització
dun vehicle de tres rodes per a la seva utilització com a seguidor
dun llum mòbil. Lesmentat vehicle ha estat equipat amb una LDR
i dos motors de corrent continu que li permetran girar fins a localitzar
un llum i desplaçar-se, tot seguint-lo, un cop el llum aquest hagi
estat localitzat.
|
Entrades/sortides (mòduls
utilitzats, vies...) |
-
M43 control de motors
-
M36 entrades digitals
|
Llista del programa de
control |
A continuació es
llista
el procediment utilitzat en WinLogo.
proc troba
;es el procediment principal,
busca la llum. El mòdul de motors és a la via c.
El mòdul d'entrades és a la via a
repeteix 30 [giraraladreta]
repeteix 30 [giraralesquerra]
troba
fi
proc buscaimira
;si troba la llum tira endavant
i sinó espera 1 centèssima. El mòdul de motors és
a la via c. El mòdul d'entrades és a la via a
si estat.entrada? "a 1 =
"ver [motors "c [1 d 2 d] comprovallum]
espera 1
fi
proc giraraladreta
;va a la dreta i mira a
veure si troba la llum. Això dura aprox 1 centèssima que
és el temps que dura el procediment buscaimira. El mòdul
de motors és a la via c. El mòdul d'entrades és
a la via a
dreta.motor "c 1
buscaimira
fi
proc giraralesquerra
;va a l'esquerra i mira
a veure si troba la llum. Això dura aprox 1 centèssima que
és el temps que dura el procediment buscaimira. El mòdul
de motors és a la via c. El mòdul d'entrades és
a la via a
esquerra.motor "c 1
buscaimira
fi
proc comprovallum
;El mòdul de motors
és a la via c. El mòdul d'entrades és a la via
a
si estat.entrada? "a 1 =
"fals [atura.motor "c 1 atura.motor "c 2 troba]
comprovallum
fi
|
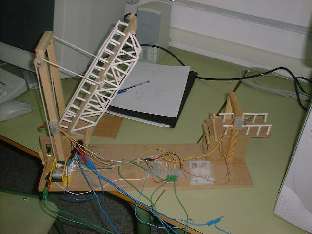
Esquemes / dibuixos /
fotos |
 
|
Possibles millores |
-
Les millores poden plantejar-se
des de diversos punts de vista:
-
Ampliant el nombre dhores de
lactivitat bàsica
-
Afegint complexitat al muntatge.
-
Les esmentades millores podrien
ser del tipus:
-
Addició dun brunzidor
que avisi quan el vehicle avança; daquesta manera podrem evitar
una colisió amb el vehicle. Per dur a terme aquesta millora
només caldrà disposar del mòdul display
-
Implementació de canvis
que permetin el nostre vehicle de seguir una línia blanca dibuixada
al terra, simulant, daquesta manera, els vehicles que puguin haver en
alguns magatzems on la tecnologia és part important
-
Implementació de canvis
que permetin el nostre vehicle de convertir-se en un vehicle salvaobstacles,
mitjançant la utilització de fins de cursa, que aniria girant
fins arribar a evitar lobstacle amb el qual ha topat per tal de seguir
el seu camí
-
Existeix la possibilitat de
dur a terme un gran ventall se variants. Una daquestes variants podria
ser el disseny duna tortuga de logo, que mitjançant un retolador
i un electroimant que el fes pujar i baixar, pogués ser comandada
per lalumne per tal de realitzar, físicament, les tasques que la
tortuga de logo duu a terme en la pantalla.
|
Qüestions / activitats
d'avaluació |
-
Es valorarà el procediment
seguit per lalumnat tant a lhora de dissenyar el procediement dautomatització
com a lhora dimplementar-lo.
|
Valoració / conclusions |
-
Creiem que es pot plantejar
la proposta als alumnes duna forma oberta (un vehicle que ha de seguir
una llum, una línia, etc) de tal manera que hagin de ser ells mateixos
qui escullin la seva via de treball. Així, poden sortir projectes
amb diversos enfocaments que després es posen en comú amb
tot el grup per tal de valorar les diverses solucions adoptades.
|
per
tornar a :
|
|
|
Índex
de treballs
|
| |

|
| |

|
|