|
Habitatge
domótic
|
|
Descripció
i característiques del projecte
|
|
| Data: Juliol 2001 |
|
|
RESUM DEL PROJECTE
APLICAT AMB EL SADEX
|
|
|
Autors:
|
|
Joan Alins Presas
jalins2@pie.xtec.es IES Castellar del Vallès Castellar del Vallès
|
|
Xavier Badia Pallàs
xbadia1@pie.xtec.es IES Castellar Castellar del Vallès
|
|
Manel Escanes Ginés
mescanes@pie.xtec.es IES Ferran Casablanques Sabadell
|
|
Antoni Millan Medina
amillan2@pie.xtec.es
IES Castellar Castellar del Vallès
|
|
Data: 13 / 7 / 2001
|
Nivell/cicle/crèdit:
Tecnologia Industrial, 2n. cicle d'E.S.O. Crèdit comú: Màquines,
estructures i mecanismes
Crèdit comú: Informàtica i comunicacions.
|
|
Temps aprox.:
10 u.l..
|
|
Objectiu del projecte |
-
Utilitzar l'equip SADEX Control
i el programa Winlogo + Micromón
-
Aplicar el control per ordinador
a una maqueta que simula un cas real
-
Utilitzar un luxòmetre
com a element de captació i mesura de la intensitat lluminosa
-
Utilitzar un termòmetre
com a element de captació i mesura de la temperatura
-
Utilitzar un higròmetre
com a element de captació i mesura de la humitat relativa (%).
-
Introduir als alumnes en el
mon del control i l'automatització.
|
Requeriments |
-
Alimentar el mòdul de
control de relés de dos contactes on cal connectar una font 1 d
alimentació de 8V , i connectar al motor 1 per fer girar el
motor amb una hèlix que simularà el climatitzador ( tenir
en compte la polaritat del motor per fer coincidir el sentit de gir
amb les ordres).
-
Al mòdul de relés
de dos contactes cal connectar una font 2 d alimentació de
5 V i una resistència que simularà la calefacció
de l'habitatge.
-
Al mòdul de relés
de dos contactes cal connectar una font 1 d alimentació de 8V
que ens permetrà fer la simulació de la il·luminació
de l'habitatge, juntament amb un luxòmetre.
-
Al mòdul de relés
d'un contacte cal connectar una font 1 d alimentació de 8V
que ens permetrà fer la simulació d'un aspersor de rec del
jardí de l'habitatge, controlat amb la sonda d'humitat.
-
Al mòdul de control de
motors cal connectar un dels motors a una font 1 d alimentació
de 8V que ens permetrà fer la simulació d'una
persiana automàtica amb uns finals de cursa que estaran controlats
amb un mòdul d'entrades digitals.
|
Material i equipament |
-
Equip SADEX CONTROL
-
Interfície
-
Ordinador 486 o superior.
-
Mòduls de l'equip Sadex:
captador de llum, captador de temperatura, captador d'humitat, relés
d'un contacte, relés de dos contactes, control de motors i
d'entrades digitals.
-
Una hèlix de plàstic.
-
Tres motors DC.
-
Bombeta de 24 V
-
Resistència de 2,2 ohms
-
Daus de connexió, cables
per connectar als mòduls, pinces de cocodril.
-
2 fonts d'alimentació.
-
Muntatge d'estructura del Mecano.
-
Eines i material de l'ATESO.
-
Programa Winlogo
|
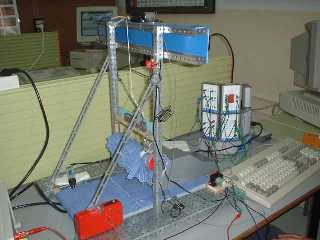
Descripció del
projecte i funcionament |
-
Es tracta de realitzar un programa
que controli el nivell de llum d'un habitatge que permeti engegar
les llums automàticament quan sigui necessari, i controlar el funcionament
d'unes persianes automàtiques per tal d'aprofitar la llum solar.
-
Així mateix, aplicarem
el control informàtic per la climatització o calefacció
de l'habitatge en funció de la temperatura ambiental. Si tenim un
valor de temperatura ambiental superior a t1 s'engegarà el climatitzador,
si tenim un valor de temperatura ambiental inferior a t2,
aleshores s'activa la calefacció. Té com a finalitat la programació
de l'estat de confort d'una habitació mitjançant el paràmetre
de la temperatura.
-
També es controla un
sistema de rec mitjançant un detector d'humitat relativa, que depenent
de dos paràmetres h1 i h2 (nivell d'humitat elevat o baix).
-
Es treballaran els conceptes
més bàsics de WINLOGO i indispensables per a la programació
del projecte amb el SADEX CONTROL.
-
Es farà la programació
i connexió del nostre projecte.
|
Entrades/sortides (mòduls
utilitzats, vies...) |
-
A M17 Termòmetre (Sonda
de temperatura)
-
B M26 Higròmetre (Sonda
d'humitat relativa)
-
C M19 Luxòmetre (Cèl·lula
Fotoelèctrica.)
-
D Sense aplicació.
-
E M41 Relés d'un contacte
-
F M43 Control de motors
-
G M36 Entrades digitals
-
H M42 Relés de dos contactes
|
| Esquema de control de
magnituds |
| IL·LUMINACIÓ
Lux < làmpada (
ON )
Lux > làmpada ( OFF
)
(1) 11,4 VOLTS
200 LUX
(2) 9 VOLTS
100 LUX
(3) <3,5 VOLTS
0 LUX
TEMPERATURA
A) Ventilador
Tª < 22º C---------
ventilador ( OFF )
Tª > 22º C ---------
ventilador ( ON )
B) Calefactor
T > 25º C--------- resistència
( OFF )
T < 22º C --------
resistència ( ON )
PERSIANES
A) Nivell il·luminació
MÀXIM
PERSIANES --- AMUNT I
LLUMS (OFF) INTERRUPTORS 1 , 2 ( OFF)
B) Nivell il·luminació
MITJÀ
PERSIANES --- AMUNT I
LLUMS (OFF) INTERRUPTOR 1 ( ON ) , INTERRUPTOR 2 ( OFF )
C) Nivell il·luminació
MÍNIM
PERSIANES --- AVALL I
LLUMS (ON) INTERRUPTORS 1 , 2 ( ON)
HUMITAT RELATIVA %
a) Nivell HUMITAT BAIX (
SEC)
< 35 % SISTEMA
DE REGADIU ACTIVAT
b) Nivell HUMITAT MITJÀ
( NORMAL)
< 35 % SISTEMA
DE REGADIU ATURAT
c) Nivell HUMITAT ALT ( PLUJA
)
> 80 % SISTEMA
DE REGADIU ATURAT
PERSIANES AVALL
ALARMA ESTENEDOR !!
|
Llista del programa de
control |
El programa s'ha pensat
de fer el control parcial de cada part, per provar el seu bon funcionament
i després hem realitzat un procediment general que coordini i cridi
cada procediment per separat. Fent una estructura de blocs anant de menys
a més dificultat.
procediment temperatura
termòmetre.llegit
"a
fi
procediment llum
luxòmetre.llegit
"c
fi
procediment humitat
higròmetre.llegit
"b
fi
procediment vis2
monitor2 [termòmetre.llegit
"a][luxòmetre.llegit "c]
fi
procediment vis
monitor [higròmetre.llegit
"b]
fi
procediment lampada
si llum < 30 [activa.sortida
"h 2]
espera 100
si llum > 30 [desactiva.sortida
"h 2]
espera 100
fi
procediment temp
si temperatura > 48 [activa.sortida
"h 1]
si temperatura < 47 [desactiva.sortida
"h 1]
fi
procediment humit
si humitat > 79 [desactiva.sortida
"h 1]
espera 100
si humitat < 79 [activa.sortida
"h 1]
fi
procediment total
lampada
temp
humit
finestra
total
fi
proc finestra
si llum > 30 [esquerra.motor
"f 1]
espera 100
mentre [estat.entrada? "g
1] [atura.motor "f 1]
espera 100
si llum < 30 [dreta.motor
"f 1]
mentre [estat.entrada? "g
2] [atura.motor "f 1]
fi
proc total
lampada
temp
humit
finestra
total
fi
-
A la finestra de treball del
Winlogo , escriurem :
recupera "sadex.log
actualitza.equip |
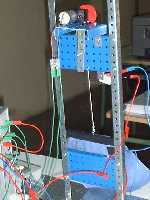
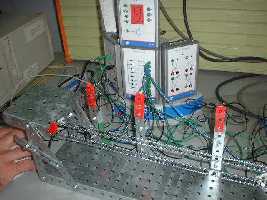
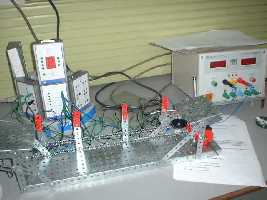
Esquemes / dibuixos /
fotos |
|
|
Possibles millores |
-
Una de les primeres millores
que proposem és la incorporació d'un detector d'incendis,
aprofitant la sonda de temperatura i la utilització del mòdul
de sortides digitals per connectar una alarma, amb la qual cosa s'incorpora
un nou element de control.
-
Utilitzar el mòdul d'entrades
digitals per fer simulacions de portes si estan tancades o obertes i que
en en avises mitjançant una alarma.
-
Utilitzar maquetes realitzades
pels alumnes del crèdit variable de l'habitatge.
|
Qüestions / activitats
d'avaluació |
-
Dibuixa l'esquema de la instal·lació
elèctrica amb una tensió de 220 V.
-
Simbologia elèctrica
-
Mesura de tensions, d'intensitats
i resistències del circuit
-
Confeccionar una taula amb les
mides de lluminositat, humitat i temperatura al llarg del dia per tal de
calcular els valors reals a l'hora de cridar el procediment principal.
-
Construcció d'una maqueta
d'un habitatge on implementar aquest control.
-
Construcció de les estructures
d'una persiana , juntament amb els mecanismes necessaris
|
Valoració / conclusions |
-
Creiem que la realització
d'aquesta pràctica seria molt més viable si en lloc de només
tenir un únic SADEX CONTROL a l'institut tinguessin algun més
per aula. Per sol ventar aquest problema ens podem ajudar de l'aula
d'informàtica per tal de fer la simulació del programa
en WINLOGO i només fer la implementació amb l'equip de SADEX
a l'aula de Tecnologia.
-
Al ser un curs intensiu hem
tingut la dificultat d'haver de conèixer el llenguatge de programació
en molt poc temps, pràcticament d'un dia per l'altre, llavors ens
caldria més temps per acabar de pair tots aquests coneixements.
-
De tota manera, la valoració
és força positiva, ja que amb poques línies de programa
es pot començar a controlar coses senzilles, obtenir ràpidament
resultats.
|
|
|
per
tornar a :
|
|
Índex
de treballs
|
| |

|
| |

|
|