PRESENTACIÓ DE L'INFORME
Es vol simular el transport dels blocs al llarg de riu amb un robot virtual anomenat Open Roberta, i en arribar al port de Gizeh els portarem fins a l'esplanada amb el robot Spike.
Que hem de fer?
*Tasca en grup
1 Fer un informe que inclogui:
- Diapositiva1: tapa de presentació : Noms-enllaç carpeta OneDrive
- Diapo2: Inclou la situació de la realitat per donar un context al treball. Afegix també alghuna imatge relacionada.
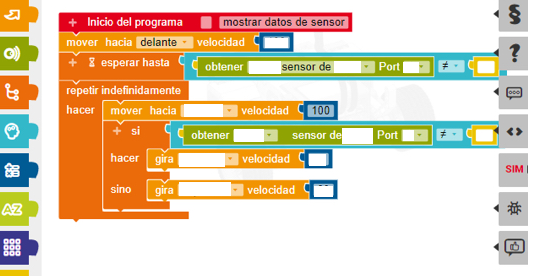
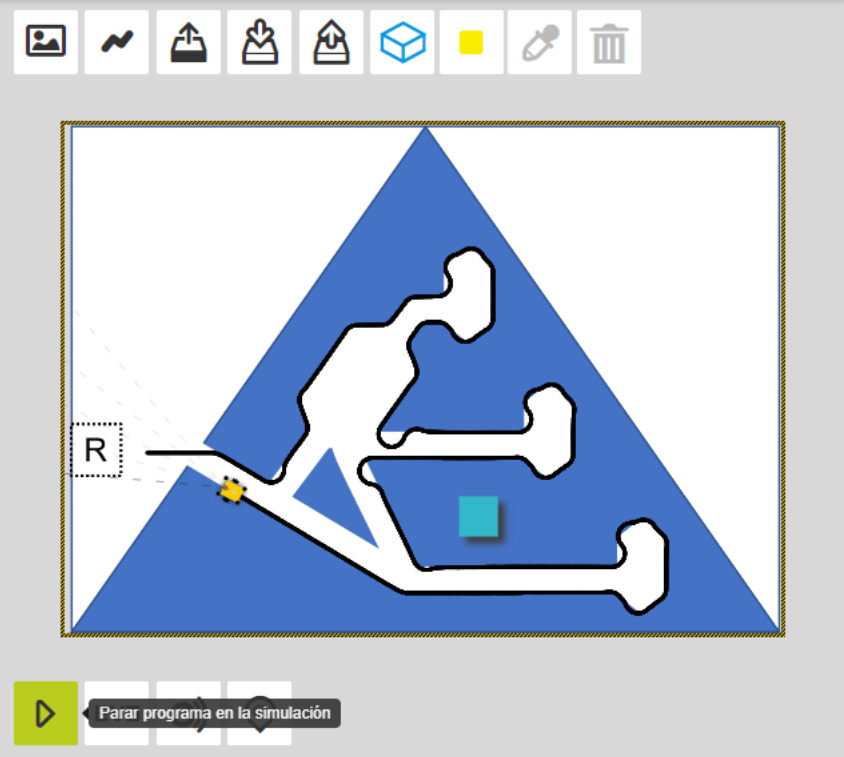
- Diapo3:Entra i surt de la piràmide: Captura de pantalla del programa. Enllaç d'OneDrive o Youtube de la captura del vídeo corresponent.
- Diapo4: Recorregut Turístic: Captura de pantalla del programa. Enllaç d'OneDrive o Youtube de la captura del vídeo corresponent.
- Diapo5:Taula setmanal i gràfica dels rols i % de la feina realitzada dels components de l'equip
LLIURAMENT DE L'INFORME (R4.1.4 ind)
- Lliuraments---> llnater@escolesgarbi.cat
CLIL
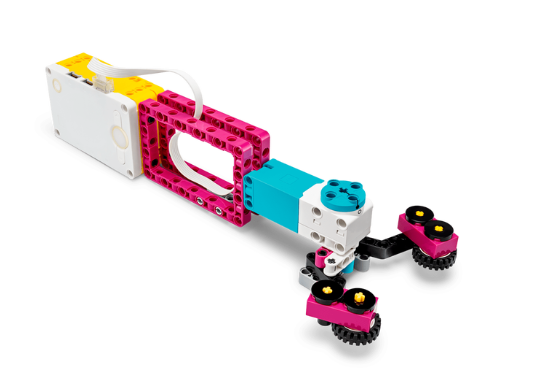
BRAÇ ROBÒTIC
Entra en aquest enllaç: Pasa el ladrillo (lego.com) i fes en 20 minuts aquest braç robòtic
Enregistra un vídeo i desa'l a OneDrive, posteriorment posa una captura en el dossier d'aprenentatge amb l'enllaç d'OneDrive
Manual de construcció
CÀMERA SUBTERRÀNIA AMB EV3, OPENROBERTA o SCRATCH (R4.1.4)
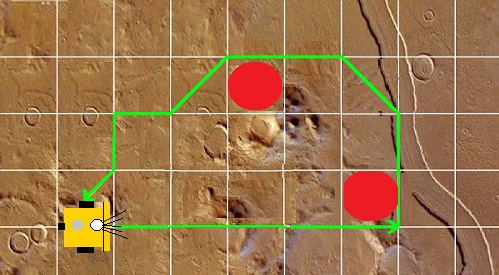
Amb OpenRoberta un robot farà un recorregut intern dins de les piràmide baixant fins la càmera subterrània, recollirà mostres per examinar-les posteriorment,
gràcies a un sensor de color vermell.Farà una simulació de les recollides i tornarà al punt de partida.
Enregistrareu el resultat i desareu el vídeo en la carpeta UT5, a la tornada de vacances posareu el títol i enganxareu l'explicació de l'activitat i l'enllaç del vídeo
en el vostre dossier d'aprenentatge.
<<<UT3...............................................................................UT5>>>