Serà
aquell que controla de manera automàtica tot procés
tecnològic - industrial. És a dir, captarà
les senyals d'entrada, les processarà i actuarà
sobre les sortides.
Podem
trobar dos tipus de sistemes de control:
LLAÇ
OBERT
Un
sistema de control en llaç obert és aquell en
que les sortides només depenen dels valors de les entrades
i del procés que haguem dissenyat. És a dir,
sobre els actuadors només influiran els valors recollits
a les entrades i el tractament i procés d'aquestes.
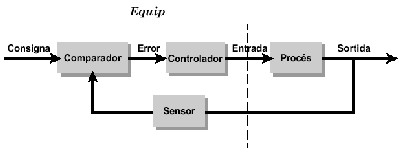
LLAÇ
TANCAT
En
canvi, en un sistema de control en llaç tancat existeix
el que denominem realimentació. Les senyals d'actuació
abans obtingudes les tornarem a l'entrada per comparar-les
amb els valors consignats i modificar si es cal el procés
que actuarà sobre les sortides. És a dir, sobre
els actuadors influiran els valors recollits a les entrades,
el tractament i procés d'aquestes i els valors de sortida
que és compararan amb els d'entrada per ajustar el
sistema.
Els
nostres alumnes no tindran prou amb aquesta definició.
Recordeu que és una àrea del coneixement nova
per ells i que no es fàcil conceptualment parlant.
Dins el CD-ROM de Formació "Tecnologia" hi
ha una carpeta SADEX/Material Suport on trobareu material
per treballar aquests conceptes ( Documents pdf per a alumnes
i professors - Annex I - ). Evidentment de la bibliografia
esmentada més avall i de la vostra pròpia experiència
podreu obtenir-ne altres exemples i metodologies de treball,
però no oblideu que és interessant que els exemples
siguin propers a la realitat dels nostres alumnes.
Els
requisits són mínims: ordinador PC o compatible
i un equip de control format per l a interfície, el
mòdul de control, els sensors de mesura i els cables
corresponents.
Quin
maquinari necessitarem?
Els
ordinadors han de disposar dels requeriments mínims
següents:
* Microprocessador 386 o superior
* 1 Mb de memòria RAM
* Dos ports sèrie RS 232
* Ratolí
Com
podeu veure un Pentium d'aquells que tenim a l'armari per
que no es pot fer servir pels requeriments de software actual,
ens anirà de "perles" per associar-lo de
manera permanent al Sadex.
De
moment ens quedem aquí, en el control informàtic
de projectes rependren el tema però...
Si
vols ampliar coneixements existeix una amplia bibliografia
sobre el tema, de mostra un botó:
BIBLIOGRAFIA
LABORDA,
Javier. Informática y educación. Edit. Laia.
Barcelona 1986.
CEMELI, Ramon i BONJORN, Lluís. Fem servir l'ordinador.
Col·lecció Rosa Sensat. Edicions 62. Barcelona
1987.
VAN
WEERT, Tom i altres. Informatics for Secondary Education.
A Curriculum for Schools. UNESCO. Paris 1994.
PAWSON,
Richard. El libro del Robot. Edit. Gustavo Gili. Barcelona
1986.
POTTER,
Tony. Cómo hacer Robots controlados por ordenador.
Ediciones Generales Anaya. Madrid 1985.
POTTER,
Tony. Cómo hacer coches y trenes controlados por
ordenador. Ediciones Generales Anaya. Madrid 1985.
BERCK,
A.A. Robótica práctica para el Spectrum.
Edic. Díaz de Santos. Madrid 1985.
BISHOP,
Graham. ZX Spectrum, teoría y proyectos de interfases.
Edit. McGraw Hill. Madrid 1984.
FERRATÉ,
G. i altres. Robótica industrial. Marcombo Boixareu
Editores. Barcelona 1986.
BOADA,
Joan. Robótica: un medio de enseñanza interdisciplinar
y de interciclos. Revista Infodidac n. 19-20, 1992; pàgs.
7-15.
ALMARAZ,
Angel i altres. Tecnologia 3: operadores electrónicos
y de control. Edit. McGraw Hill. Madrid 1992.
DUNN,
Stewart. An introduction to computers in technology. Deltronics.
Llanelli 1991.
McFARLANE,
Angela; LING, Peter; FLEURY, Paul. Soft-Lab. National
Council for Educational Technology. Coventry 1992.
MIRALLES,
Alfred; REGALÉS, Jordi. Informàtica i comunicacions.
Sinera en disc. CD-ROM. PIE. Departament d'Ensenyament.
Barcelona 1995.
MARTÍNEZ,
Gilbert; REGALÉS, Jordi. Micromón de Control
i Robótica. PIE-Departament d'Ensenyament. Barcelona
1988.
MARTÍNEZ,
Gilbert; REGALÉS, Jordi. Curs de Tecnologia de
Control i Robótica. PIE-Departament d'Ensenyament.
Barcelona 1988.