| |
|
|
|
Treballs de recerca: Braç robòtic controlat per ordinador |
|
|
|
|
|
|
|
| |
|
|
| |
| TREBALL DE RECERCA |
| BRAÇ ROBÒTIC CONTROLAT PER ORDINADOR |
Tot seguit presentem el nostre treball de recerca, basat en la robòtica, en el qual nosaltres mateixos hem dut a terme tots (o gairebé tots) els processos necessaris per construiri controlar amb èxit un actuador robòtic, en el nostre cas, un braç. |
|
Ens vam decidir per aquest tema perquè ens agrada la tecnologia i teníem interès per fer un treball en que aprenguéssim a fer els pertinents processos de conformació del robot, tals com la construcció física del braç, o la elaboració d'un programa que sigui adient per al seu control.
Tot plegat ha estat un procés difícil, però alhora divertit i enriquidor. La part més difícil ha estat, sense dubte, la part relacionada amb la informàtica, ja que el nostre desconeixement de la programació o de les connexions necessàries entre l'ordinador i el braç robòtic han suposat un agreujant i un retràs important en el procés normal de construcció. Malgrat això, tan bon punt hem après les ordres bàsiques per compilar un senzill programa per controlar el robot, i, amb l'ajuda del nostre tutor per connectar correctament el braç amb l'ordinador, el pitjor aspecte del treball ha esdevingut un senzill exercici. |
|
|
Què volem que faci el nostre robot?
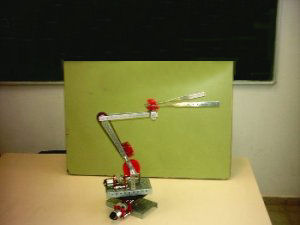
La nostra intenció és que el nostre robot, que compta amb quatre graus de llibertat, sigui capaç de moure's únicament amb la ajuda dels senyals que rep de l'ordinador, agafar objectes que estiguin situats dins de la seva zona d'acció, i canviar-los de posició, fent que interactuï amb el medi. |
|
|
Quin tipus de robot hem escollit?
Hem escollit un robot d'estructura polar amb quatre graus de llibertatja que, tot i que requereix una construcció complexa, és la que té més graus de llibertat, i per tant, la que permet més moviments i més fluids. Tots aquests graus de llibertat que donen moviment al braç degudament combinats li permeten dur a terme el seu treball sense complicacions dins d'una semiesfera d'uns 40 centímetres de radi.
Parts del robot |
|
Una vegada construït el nostre braç manipulador el podem dividir en quatre blocs:
Bloc 1: aquesta part és la corresponent a la base i la placa giratòria del robot. És on està situat el primer motor, amb els engranatges pertinents per poder fer moure la placa giratòria, que és una part fonamental en el robot. Aquest bloc seria l'equivalent a la pelvis en les persones.
Hem utilitzat la connexió del plat d'un tocadiscs per garantir l'estabilitat de la placa giratòria, ja que aquesta ha de suportar un pes considerable.
Bloc 2: aquesta part és la part que corresponent a l'avantbraç del robot.
El motor està fixat a una placa giratòria. Aquest segon, quan s'acciona, tal i com ho fa l'altre motor, posa en moviment un vis sens fi, que alhora fa que un sistema de rodes dentades es posi en moviment, i d'aquesta manera, aconseguim el moviment cap endavant i cap endarrere de l'avantbraç.
Bloc 3: aquesta part del nostre robot, constitueix el braç del robot. Hi trobem el tercer motor, que està situat al costat dret de l'avantbraç.
Quan aquest s'acciona, comencen a girar dues petites rodes dentades, que estan connectades, mitjançant una corretja de transmissió dentada, a unes altres rodes dentades, una mica més grans, ja que així perdríem velocitat a la vegada que guanyaríem en força. D'aquesta manera podríem controla millor el braç, alhora que aquest guanyariaforça per poder aixecar un determinat cos.
Bloc 4:Aquesta és l'última part del robot. Hi trobem el quart motor i la pinça, l'efector final.
En accionar el motor, aquest fa moure un engranatge cònic de 45 graus, que està connectat a una altre d'igual, i per tant aquest es posa en moviment. Aquesta segona roda fa moure un altre sistema de dues rodes dentades que estan connectades entre sí. Aquest sistema de rodes quan es posa en moviment, fa obrir i tancar unes barres d'alumini, que permeten agafar i desar coses, l'equivalent al cos humà serien les mans. |
|
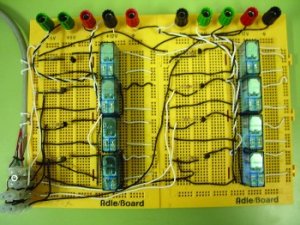
Un cop construït el robot, es va fer patent la necessitat d'algun mitjà per controlar els seus moviments, ja que el mitjà momentani que teníem consistia en una sèrie d'interruptors connectats als motors, utilitzats durant les proves de moviment, en busca de falles en els mecanismes o unions. Aquest mitjà va resultar molt toixarrut, voluminós i poc pràctic, de manera que vam decidir que controlar el braç robòtic mitjançant un ordinador seria una manera molt més eficient de dur-ho a terme.Però per controlar mitjançant l'ordinador els moviments de qualsevol aparell mecànic extern, en el nostre cas, el braç robòtic, és necessari un interface, que és el muntatge pertinent, per a poder connectar l'ordinador al nostre braç manipulador, sense fer malbé cap tipus de sistema, és a dir, un muntatge que tradueixi les ordres que li enviem des de l'ordinador, i les enviï al robot, per a que aquest faci les seves funcions. |
|
|
A més a més necessitem un programa que pugui emetre senyals elèctriques aplicades estratègicament als borns dels motors. De manera que va sorgir un altre aspecte a dur a terme del treball: compilar un programa que governi el braç robòtic amb eficàcia.
Un cop fet el muntatge definitiu del circuit; amb els vuit relés i vuit resistències, i els transistors, el resultat que vam obtenir va ser una perfecta coordinació del sistema, tot fent que el braç robòtic executés les ordres que li enviava l'ordinador amb eficiència, rapidesa i precisió. |
|
|
Joaquin Navio Cabanillas
Daniel Moseguí González
Batxillerat 2on Z |
 |
|
| |
| |
| |
| |
| |
|
|
|
|
|